Voice Controlled Robot Arm
We designed and developed a bot that used
voice input to perform actions using
EasyVR speech recognition and Arduino
Motivation (Why)
Robots perform functions with a high accuracy that surpasses that of the most experienced human operator. The primary objective was to make the Robotic arm that can be controlled using voice commands and we foresee a future where these commands can be stored in voice format and can be fed to the bot to perform repetitive tasks.
Techtics (What & How)
 To achieve our goal of controlling a Robot Arm using voice commands, as a first step, we researched how to create a Robot Arm, what kind of motors were needed, how many joints/axis were needed to get the desired output?
To achieve our goal of controlling a Robot Arm using voice commands, as a first step, we researched how to create a Robot Arm, what kind of motors were needed, how many joints/axis were needed to get the desired output?
Next, we explored microcontrollers and speech recognition modules already available in the market for us to utilize. We realized that it was very important to perform thorough research about not just the hardware but also the software components to get the accurate output.
As a result of these findings, we assembled a Robot Arm with a five-axis pick-and-place manipulator which utilized Servo motors for movement of the joints. Servo motor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity, and acceleration. In simple terms, they work best to operate robotic joints.

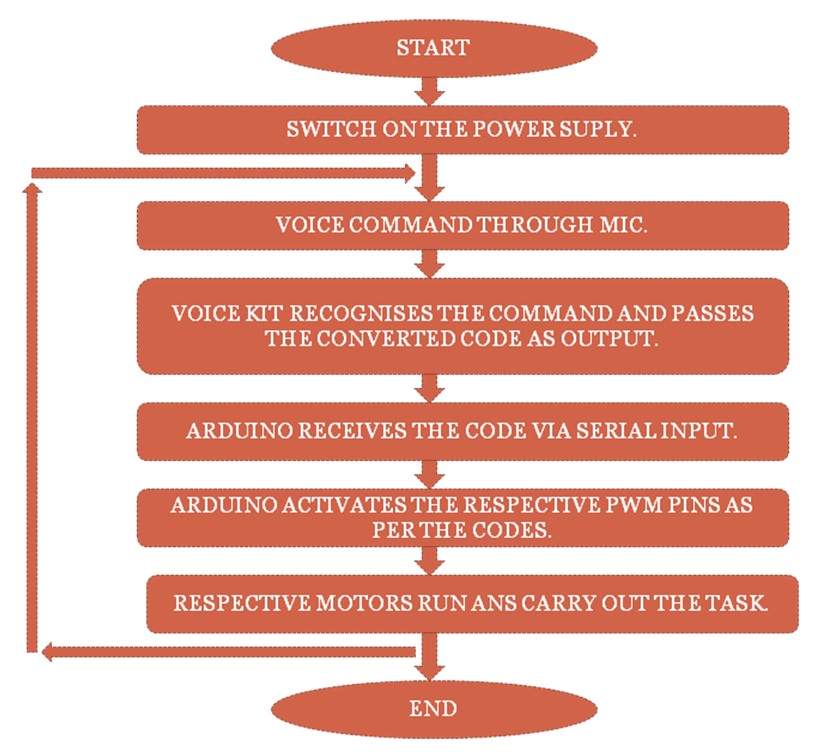
On the Software side, we utilized C Programming for Arduino for interfacing the robot arm with the voice commands provided using the EasyVR module which is a multi-purpose speech recognition module designed to add versatile, robust, and cost-effective speech recognition capabilities, thus fulfilling our purpose.
Reflection & Application (now & next)
A robotic arm is a robotic manipulator, usually programmable, with similar functions to a human arm. Robots are built and programmed to be job-specific. Without risking human life or limb, robots can replace humans in some hazardous duty service.
We were able to successfully command the bot to perform a pick and place action, the robotic arm works in group and subgroup sequences which are demonstrated in the video. My friend Keshav Jha is the Operator and Sautik Mahato gives a cameo appearance, while I am the narrator of the video.
As a future application, the voice commands can be stored as recorded inputs and robots can perform repetitive tasks based on them. Making it easier for the operator, as simple as verbally explaining to someone which actions are to be performed.
Tools & Technology




Creators
Keshav Jha, Sautik Mahato and Suryakant Sahoo